|
1.開発の背景
近年のモバイル端末や自動車の電子化、IoT技術の発展により、電子回路を形成するプリント基板に電子部品を実装する電子部品実装ロボットの需要が急速に増加している。また、世界中の電子機器を集約して製造するEMS(Electronics manufacturing service)の台頭に伴い、実装ロボットには大量生産だけでなく多種多様な基板への柔軟な対応、小型軽量・高速高精度な性能が要求されている。NXTシリーズは小型モジュール式で段取り替え容易な着脱機構を備え、かつ高速高精度実装を可能としたが、その実現には精密サーボ技術の開発は重要課題であった。
2.開発技術の概要
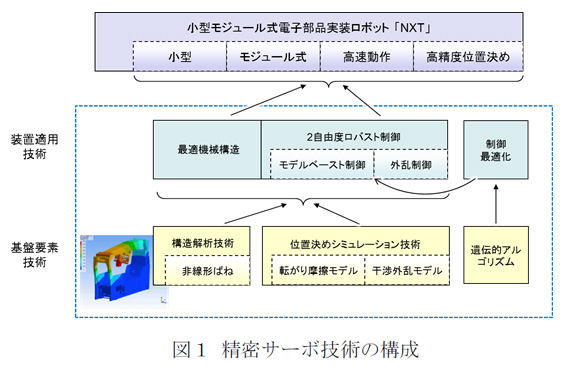
小型軽量化に伴う機構振動の抑制と高速高精度実装の実現手段として、2自由度ロバスト制御系の設計および遺伝的アルゴリズムによる制御系の最適化を、産学連携のオープンイノベーションにより開発した。そこでは、短期間で飛躍的な性能進化への対応を、メカ・制御統合設計の開発プロセスにて実施した。さらに、高速高精度を実現する構造と制御系の同時設計を構造解析技術と的確に装置性能を数値化する位置決めシミュレーション技術を用いて実現した。その際には、定型化されない着脱機構の剛性や微小な摩擦モデルを構築し、実機試作確認前に必要な動剛性の確保を達成した。
3.開発技術の特徴と効果
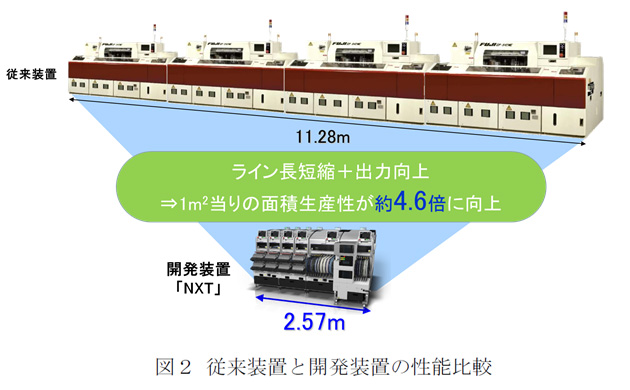
従来装置に対して、実装速度230%増の高速化、面積生産性は4.6倍を実現した。さらに、実装精度は70%向上し、従来できなかった世界最小部品の実装、生産効率と品質向上の両立、多品種生産を可能とした。リリース後の累計出荷は60,000台を超え、世界シェアは業界トップの約30%を占めている。今後も自動運転やAI、スマートホームなどの発展を支える電子機器は不可欠であり、電子機器のマザーマシンとなる実装ロボットの高密度、高速実装性能はより社会に貢献するものと考える。また、本精密サーボ技術を他の製品開発へ展開し、より広い側面から産業を支える装置開発を進めていきたい。
|