|
超高齢化社会が進行する中で、高齢者の歩行機能の低下が問題となっている。高齢者のQOL向上のためには、自分の脚で歩くことが極めて重要であり、近年、ロボット技術を用いた歩行アシストロボットが開発され、病院や介護施設等に導入されつつあるが課題も多い。
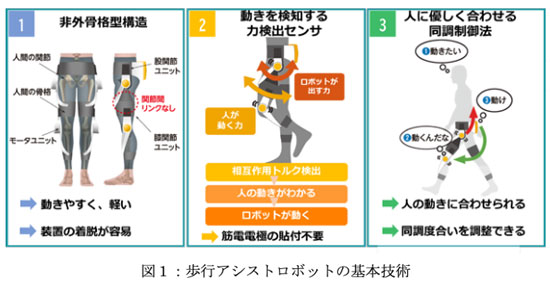
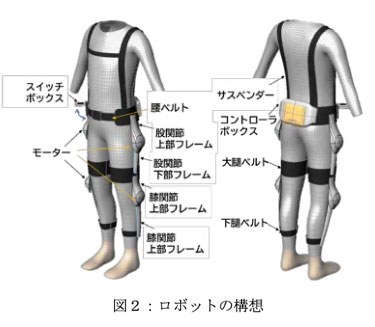
本技術開発では、一般の高齢者に受け入れられる衣服感覚で容易に着用できる歩行アシストロボットの開発を目指す。図1に本開発で適用する基本技術の概要を、図2にロボットの構想を示す。ロボットの構造として、各関節ユニット間に剛体リンク機構を持たず、モータの発生力を直接各関節に伝える非外骨格構造を採用することで、軽量・小型、安価なロボットを実現する。また、装着者の自然な歩行を妨げないように、装着者の動作意思を検出するための人とロボットの間の相互作用トルク検出技術、装着者の運動機能レベルにあった運動補助を実現するための同調制御法を採用する。これらの基本技術に加えて安全面での課題を解決するため、つまずきの原因となる摺り足歩行をロボットが是正する機能を実現し、つまずき転倒リスクの軽減を図る。さらに操作性の観点から、高齢者でも一人で着脱できるように、空気圧を用いたロボットの固定方法を採用する。
従来、脚の不自由な高齢者の移動手段は車椅子を用いることが多く、そのために次第に脚が弱り、寝たきりになるケースも少なくない。歩行アシストロボットの開発は、そのような負のサイクルを改善して、高齢者のQOL向上や社会進出の推進に寄与することが期待される。
|